DC-moottori: käyttöperiaate. DC-moottori: Laite
Ensinnäkin pyörii 1800-luvullasähkömoottorit on DC-moottori. Toiminnan periaate tunnetaan viime vuosisadan puolivälistä lähtien, ja tähän päivään asti DC-moottorit jatkavat uskollisesti palvelemista ihmiselle, joka ajaa monia hyödyllisiä koneita ja mekanismeja.
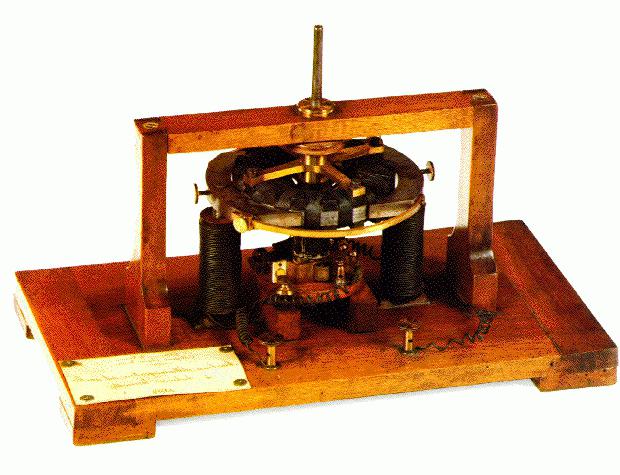
Ensimmäinen DFT
Koska 1900-luvun 1900-luvulla niiden kehittämisessä heovat käyneet läpi useita vaiheita. Tosiasia on, että ennen näyttämistä vuosisadan lopulla ennen viimeistä konekytkintä, ainoa sähkön lähde oli galvaaninen solu. Siksi kaikki ensimmäiset sähkömoottorit voisivat toimia vain tasavirralla.
Mikä oli ensimmäinen DC-moottori? Toimintaperiaate laitteen ja moottorit rakennetaan ensimmäisellä puoliskolla 19. vuosisadalla, on seuraavanlainen. Tärkein kenttä oli kiinteä joukko kestomagneetteja tai sähkömagneetteja sauva, ei ole yleistä suljetun magneettipiirin. Keskeiset-napainen ankkuri on muodostettu useista erillisistä tanko magneetteja yhteiselle akselille, jotka ohjaavat vastenmielinen ja vetovoimia napoihin induktorin. Tyypillisiä edustajia heistä moottoreiden W. Ricci (1833) ja B. Jacoby (1834) on varustettu mekaanisten kytkimien virta sähkömagneetteja vahvikkeet liikkuvien koskettimien piirissä ankkurin käämin.

Miten Jacobi-moottori toimi
Mikä oli tämän koneen periaate? Jacobi-tasavirtamoottorilla ja sen analogeilla oli sykkivä sähkömagneettinen hetki. Anturin ja induktorin vastakkaisten napojen lähestyessä lähestyttäessä vetovoiman magneettista voimaa moottorin hetki saavutti nopeasti enimmäismäärän. Sitten mekaanisella kytkimellä keskeytettiin virtaus solenoidien virralla, kun ne sijaitsivat päisteisiin päihin nähden. Momentti laski nollaan. Inertian takia ankkurin ja käytettävä mekanismi ankkuri pylväät alta kelan navat, tässä vaiheessa ne kytkimen virran syötetään vastakkaiseen suuntaan, niiden napaisuus myös päinvastainen, ja painovoima lähimpään napaan kelan korvataan työntövoima. Siten Jacobi-moottoria pyöritettiin peräkkäisillä työntövoimilla.
Rengasmainen ankkuri tulee näkyviin
Ankkuriventtiilin solenoideissaJacobi-virta katkaistiin säännöllisesti, niiden luoma magneettikenttä häviää ja sen energia muunnettiin käämien lämpöhäviöiksi. Siten sähkömagneettinen muunnos (galvaaninen kenno) mekaaniseksi virraksi sattui sähkökatkoksella keskeytyksillä. Tarvittiin moottori, jossa on jatkuva suljettu käämitys, jonka virta virtaisi jatkuvasti koko sen toiminnan ajan.
Ja tällainen fuhtufn luotiin vuonna 1860 A. Pachinotti. Mikä ero oli sen DC-moottorin ja sen edeltäjien välillä? Toimintaperiaate ja Pacintotti-moottorin rakentaminen ovat seuraavat. Ankkurina hän käytti teräsrenkaa, jossa pinnat kiinnitettiin pystyakseliin. Tässä tapauksessa ankkurissa ei ollut selkeästi ilmaistuja napoja. Hänestä tuli implisiittinen napa.
Sormuskelojen päiden välissä oli haavojaankkurikäämitys, jonka päät on kytketty sarjaan ankkuriin, ja pisteiden välillä, yhteyden kunkin kahdesta kelasta tehtiin hana kytketty kerääjä levyt on järjestetty kehää pitkin pohjan moottorin akselin, joiden lukumäärä on yhtä suuri kuin määrä keloja. Koko ankkuri on suljettu itsensä ja sarjaliitäntä olevia sen kelat on kytketty viereisiin kerääjä levyt, jotka liukuvat parin virransyötön rullat.
Rengasmainen ankkuri sijoitettiin kahden napojen väliinsähkömagneetit kiinteän staattorin IC, siten, että voima linjat tuottaman magneettikentän magnetointi sisältyy sylinterimäiseen ulkopintaan moottorin ankkurin pohjoisnapa herätteen läpi rengasmaisen ankkurin, siirtämättä sisäosaan sen reikä, ja ulos etelänavan.
Miten Pachinottin moottori toimi
Mikä oli hänen toimintansa periaate? Pachinotti-suora moottori toimi aivan kuten nykyaikainen DPT.
Tämän induktorin napa magneettikentässäpolaarisuus oli aina tietyn määrän johtimia ankkurikäämityksen nykyinen jatkuvasti suuntaan, jolloin ankkuri virran suunnan mukaan eri napojen induktorin oli päinvastainen. Tämä saavutettiin asettamalla virransyötön rullat, jotka toimivat harjat, väliseen tilaan napojen induktorin. Näin ollen ankkuri hetkellinen virta virtasi kelan läpi rulla, keräilijä levy ja niihin sitoutuneiden hanat, joka on myös väli napojen, virtasi sitten vastakkaisiin suuntiin kahden poluobmotkam-oksia, ja lopulta virtasi haarajohdon, kollektori levyn ja rullan toisen napojen välein. Näin kela ankkuri alla navat kelan muuttunut, mutta virran suunta pysyivät ennallaan niitä.
Amperen lain mukaan, jokaisen käämin johdon osaltaInduktorin napa magneettikentässä oleva virtaus toimi voimalla, jonka suunta määräytyy "vasemman käden" tunnetun säännön mukaan. Moottorin akselin suhteen tämä voima loi vääntömomentin, ja kaikkien tällaisten voimien hetkien summa antaa DCT: n koko vääntömomentin, joka on jo melkein vakio useille keräilijän levyille.
DFT rengasvahvistimella ja kieliopin käämityksellä
Kuten usein tapahtui tieteen ja historian historiassatekniikka, A. Pacinottin keksintö ei ole löytänyt hakemusta. Se oli kymmenen vuotta unohdettu, kunnes ranskalais-saksalainen keksijä Z. Gramm toisti sen toistuvasti vuonna 1870 samankaltaisessa suoraa virtamuunnostajana. Näissä koneissa pyörimisakseli oli jo vaakasuorassa, ja hiiliharjoja käytettiin liukuen lähes modernin mallin keräilevyillä. 1800-luvun 70-luvulla sähkökoneiden kääntymiskyvyn periaate oli tullut tunnetuksi, ja Gram-konetta käytettiin generaattorina ja DC-moottorina. Toiminnan periaate on jo kuvattu edellä.
Huolimatta siitä, että rengasmaisen ankkurin keksintöoli tärkeä askel DPT: n kehityksessä, sen käämityksessä (Gramovskaya) oli merkittävä haitta. Induktorin napojen magneettikentässä sijoitettiin vain ne johtimet (nimeltään aktiiviset johtimet), jotka sijaitsivat näiden navojen alapuolella kaapin ulkosylinterin pinnalla. Heille annettiin Ampereen magneettiset voimat levittämällä moottorin akseliin vääntömomentti. Samat ei-aktiiviset johtimet, jotka kulkivat rengasmaisen ankkurin reiän läpi, eivät osallistuneet hetken luomiseen. He vain hyödyttämättä sähkönsä lämpöhäviöinä.

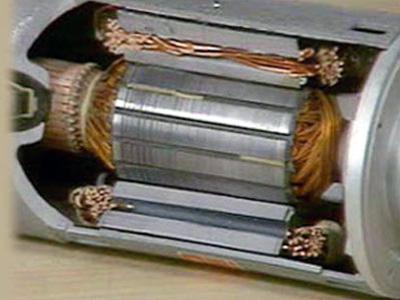
Rengasrungosta rumpuun
Poista tämä rengasmainen ankkurivuonna 1873 kuuluisa saksalainen sähköinsinööri F. Gefner-Altenek. Kuinka DC-moottori toimi? Toiminnan periaate, sen induktori-staattorin laite on sama kuin rengaskäämityksen moottorilla. Mutta arkkitehtuurin rakenne ja sen käämitys ovat muuttuneet.
Gefner-Altenek kiinnitti huomiota siihen suuntaanGram-käämityksen johdinten kiinteiden harjojen virtaus naapuri-viritystankojen alla on aina vastakkainen, ts. ne voidaan sisällyttää käämin ulkosylinterin pintaan sijoitettujen käämien koostumukseen, jonka leveys (nousu) on yhtä suuri kuin napainen jakautuminen (osa armatuksen kehästä yhtä herätystasoa kohden).
Tässä tapauksessa aukko vuonnarengas ankkuri, ja se muuttuu kiinteäksi sylinteriksi (rummuksi). Tällainen käämitys ja ankkuri itsessään annettiin rummun nimi. Kuparin kulutus siinä samaa määrää aktiivisia johtimia on paljon pienempi kuin grammin käämityksessä.

Ankkuri tulee hammastettua
Gramin ja Gefner-Altenekin koneissa pintaAnkkuri oli sileä ja sen käämityksen johtimet sijait- sivat sen välissä ja induktorin napojen välissä. Viritysytimen koveran lieriömäisen pinnan ja ankkurin kuperan pinnan välinen etäisyys oli useita millimetrejä. Siksi tarvittavan magneettikentän luomiseksi sen oli käytettävä virityskäämiä suurella magnetomotivoimalla (suurilla kierroksilla). Tämä lisäsi merkittävästi moottoreiden mittoja ja painoa. Lisäksi sen käämin arman pinnan sileä pinta oli vaikea kiinnittää. Mutta miten olla? Loppujen lopuksi, toimimaan Ampe-voiman virtapiirin johdolla, sen on sijaittava avaruuspisteissä, joissa on suuri magneettikenttä (suurella magneettisella induktiolla).
Osoitettiin, että tämä ei ole välttämätöntä. American keksijä H. Maxim ase osoitti, että jos ankkuri suorittaa rumpu vaihde, ja urat on muodostettu hampaat sijoittaa kela rullaussylinterin välinen rako napojen ja heräte voidaan vähentää millimetrin murto-osia. On mahdollista vähentää merkittävästi kokoa magnetoimiskäämit, mutta vääntömomentti DPT ei ole vähentynyt.
Kuinka tällainen jatkuva moottorinykyinen? Toimintaperiaate perustuu siihen tosiasiaan, että magneettiventtiilillä hammasteterminaalilla ei sovelleta urien uria (ei ole käytännössä lainkaan magneettikenttää), vaan itse pihdeihin. Tällöin virran esiintyminen urissa urassa on ratkaiseva tämän voiman syntymisen kannalta.
Kuinka päästä eroon pyörrevirroista
Toinen merkittävä parannus tehtiinkuuluisa keksijä T. Edisson. Mitä hän lisäsi DC-moottoriin? Toimintaperiaate pysyi ennallaan, mutta materiaali, josta hänen ankkurinsa oli tehty, muuttui. Edellisen massiivisen sijasta se laminoitiin ohuista, sähköisesti eristetyistä teräslevyistä. Tämä mahdollisti pyörrevirtojen (Foucault-virtojen) suuruuden heikkenemisessä, mikä lisäsi moottorin tehokkuutta.
DC-moottorin periaate
Lyhyesti sanottuna se voidaan muotoilla seuraavasti: kun kytketyt virtalähteen voimanlähteen vaimennuksen käämityksen, siinä näkyy suuri virta, jota kutsutaan käynnistysvirraksi ja useita kertoja sen nimellisarvosta. Lisäksi päinvastaisen napaisuuden virityspisteiden alla on myös vastakkainen virtauksen suunta, kuten on esitetty alla olevassa kuvassa. Vasemman käden säännön mukaan Ampere-voimat toimivat näihin johtimiin, suunnattu vastapäivään ja vetäen ankkurin kiertämiseen. Tässä tapauksessa sähkömagneettinen voima (vasta-EMF) suunnataan armorikäämityksen johtimiin, jotka on suunnattu virtalähteen jännitettä vastapäätä. Kun ankkuri hajoaa, anti-EMF sen käämityksessä kasvaa myös. Siten armavirtasuoja pienenee aloitusvaimentimesta arvoon, joka vastaa moottorin ominaiskäyrää.

Ankkurin pyörimisnopeuden lisäämiseksi,joko lisätä virtaa sen käämityksessä tai vähentää sen anti-EMF. Jälkimmäinen voidaan saavuttaa vähentämällä herätteen magneettikenttää pienentämällä virtaa herätekäämityksessä. Tämä menetelmä DPT: n nopeuden hallitsemiseksi on yleistynyt.
Tasavirtamoottorin periaate itsenäisellä virityksellä
Virtaliittimien (OB) liittimien liittäminenTehokkaat DFT: t suoritetaan yleensä erilliselle virtalähteelle (itsenäinen OB), joten on helpompaa säätää viritysvirran suuruutta (pyörimisnopeuden muuttamiseksi). Ominaisuuksiltaan DPT ja itsenäinen OB ovat lähes samat kuin DPT ja OB, jotka on kytketty rinnan runkopäällysteeseen.
DPT: n rinnakkaisvaihdutus
DC-moottorin periaaterinnakkainen viritys määritetään sen mekaanisella ominaisuudella, ts. pyörimisnopeuden riippuvuus kuormitushetkelle sen akselilla. Tällaiselle moottorille nopeuden muutos siirtymässä joutokäynnistä nimelliseen kuormitusnopeuteen on 2 - 10%. Tällaisia mekaanisia ominaisuuksia kutsutaan jäykiksi.

Näin ollen moottorin periaatetasavirta, jossa rinnakkaisvaihde aiheuttaa sen käytön taajuusmuuttajissa vakionopeudella pyörimisnopeudelle suurelle kuormituksen vaihtelualueelle. Kuitenkin sitä käytetään laajasti säädettävissä olevaan taajuusmuuttajaan. Nopeuden säätämiseksi voidaan käyttää sekä armourivirran että viritysvirran muutosta.
DFT: n peräkkäinen viritys
DC-moottorin periaatesarja herätteen rinnakkain, se määritetään mekaanisen ominaisuuden, joka tässä tapauksessa on pehmeä, koska moottorin kierrosnopeus vaihtelee huomattavasti kuorman muutosten mukaan. Missä on edullisin käyttää tällaista DC-moottoria? Toimintaperiaatetta rautatien ajomoottorin nopeus, joka pitäisi pienentyä on poistaa koostumus nousee ja palaa nimellisarvoon liikkeen kun tavallinen täysin vastaa DPT OB peräkkäin kytketty ankkurikäämitys. Näin ollen, merkittävä osa Sähköveturien maailmassa varustettu tällaisia laitteita.
DC - moottorin periaatesarja heräte toteuttaa kuten sykkivä virta vetomoottoreissa, jotka ovat olennaisesti samat DPT johdonmukainen RH, mutta on erityisesti suunniteltu toimimaan kanssa korjattu jo koneessa sähkövirran, jolla on merkittävä aaltoilu.
</ p>



